Angular velocity and linear velocity are pivotal concepts in both physics and engineering, frequently intertwined in numerous real-world applications ranging from robotics to automotive engineering. Understanding how to translate angular velocity to linear velocity can unlock a wealth of practical knowledge and problem-solving capabilities.
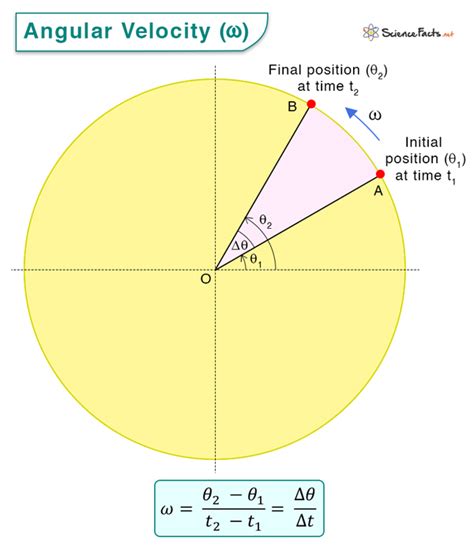
Angular velocity describes how quickly an object rotates around a fixed point, often measured in radians per second (rad/s). In contrast, linear velocity refers to the rate of change in an object’s position along a straight path, typically expressed in meters per second (m/s). The relationship between these two can be profound, particularly in applications that involve rotational movement, such as gears, flywheels, and even the rotation of celestial bodies.
Key Insights
- Primary insight with practical relevance: Angular velocity can be effectively translated to linear velocity using the formula v = ωr.
- Technical consideration with clear application: Understanding this conversion is crucial for applications involving rotating systems.
- Actionable recommendation: Use the formula v = ωr for precise calculations in rotational dynamics.
When an object rotates, it follows a circular path. To link angular velocity to linear velocity, we utilize the simple formula v = ωr, where v represents linear velocity, ω is the angular velocity, and r is the radius of the circle. This formula shows that linear velocity directly correlates to both the rate of rotation and the distance from the center of rotation.
Consider an example in the automotive industry: If a car wheel with a radius of 0.3 meters spins at an angular velocity of 10 rad/s, the linear velocity at the edge of the wheel can be calculated by multiplying the angular velocity by the radius. This results in a linear velocity of 3 m/s. Such calculations are essential for understanding aspects like tire performance and ensuring the proper functioning of mechanical systems.
In robotics, precise calculations are crucial for the motion planning of robotic arms and drones. A robotic arm with a rotating joint needs to know the linear velocity of its end effector to execute smooth, accurate movements. By applying the formula v = ωr, engineers can program the joint’s rotational speed to achieve desired linear velocities, ensuring the robotic arm performs tasks efficiently.
Beyond technical fields, this principle is also vital in educational contexts. Teachers often use this formula to explain rotational motion to students, helping them visualize and understand complex physical phenomena in a tangible way.
How do I determine the radius in rotational motion scenarios?
The radius, often denoted as r, is the distance from the center of the rotation to the point of interest. For instance, in a wheel, it’s the distance from the axis of rotation to the edge. Accurately measuring or understanding this distance is crucial for precise calculations of linear velocity.
Can angular velocity vary at different points along the radius?
Angular velocity (ω) is consistent for an entire rigid rotating body, meaning all points on a rigid object rotate at the same angular velocity. Therefore, if ω is constant, any change in linear velocity along the radius will be due to the varying distances from the rotation axis.
In conclusion, understanding the relationship between angular velocity and linear velocity is vital for many scientific and engineering applications. The formula v = ωr provides a straightforward yet powerful tool for translating rotational dynamics into linear movement, enhancing problem-solving capabilities in various fields. By embracing this formula, professionals and students alike can unlock a deeper comprehension of rotational motion and its practical implications.